Infrastructure























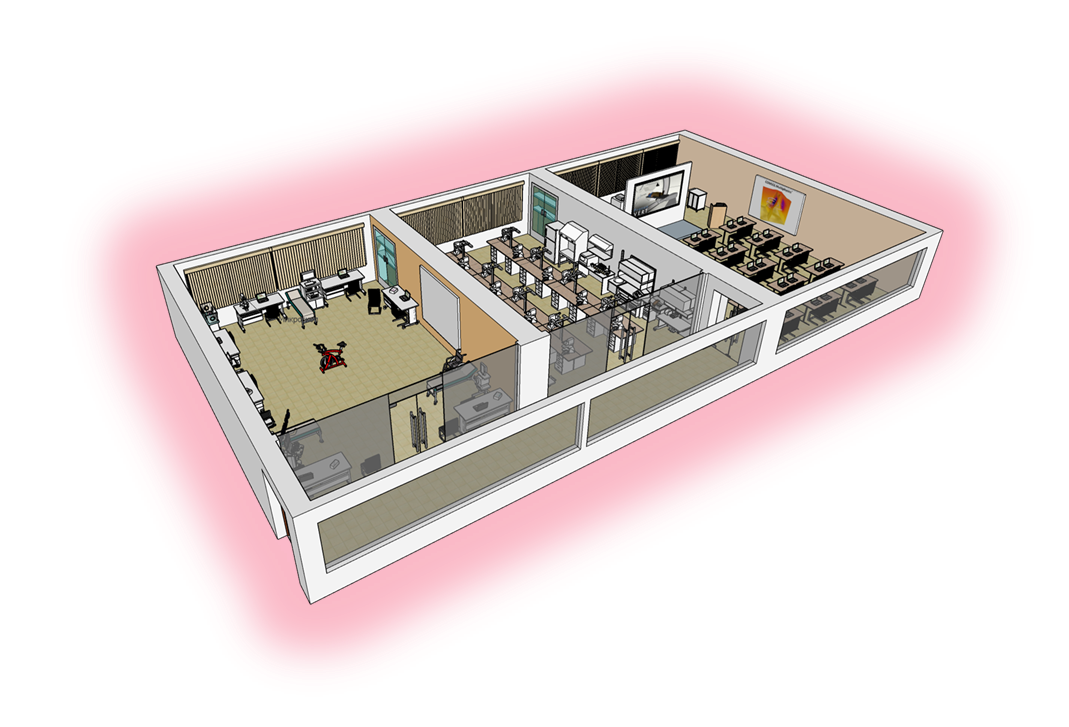




The center is designed to prepare students for work at modern digital robotic manufacturing plants and to teach them to design such facilities. It has four laboratories:
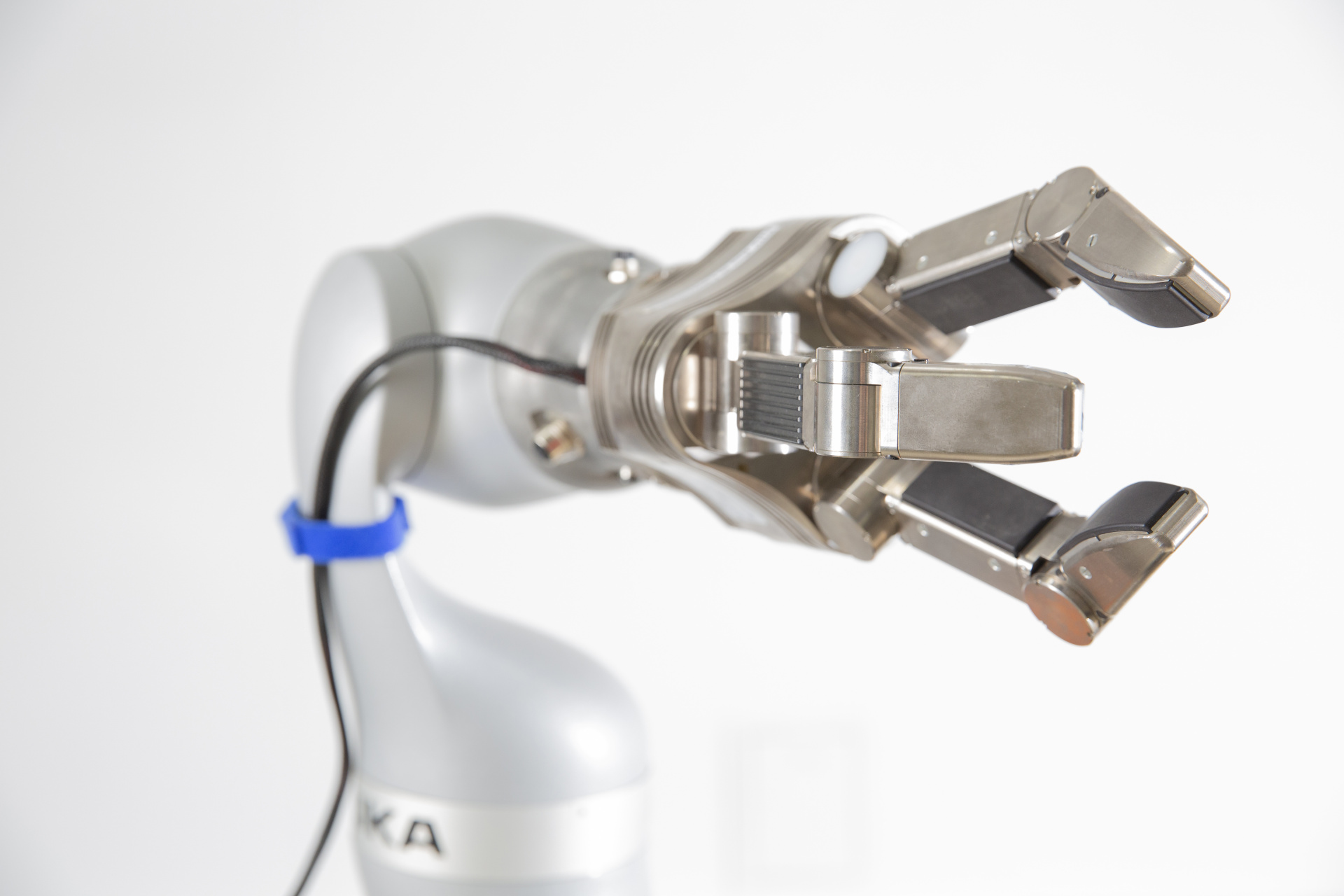
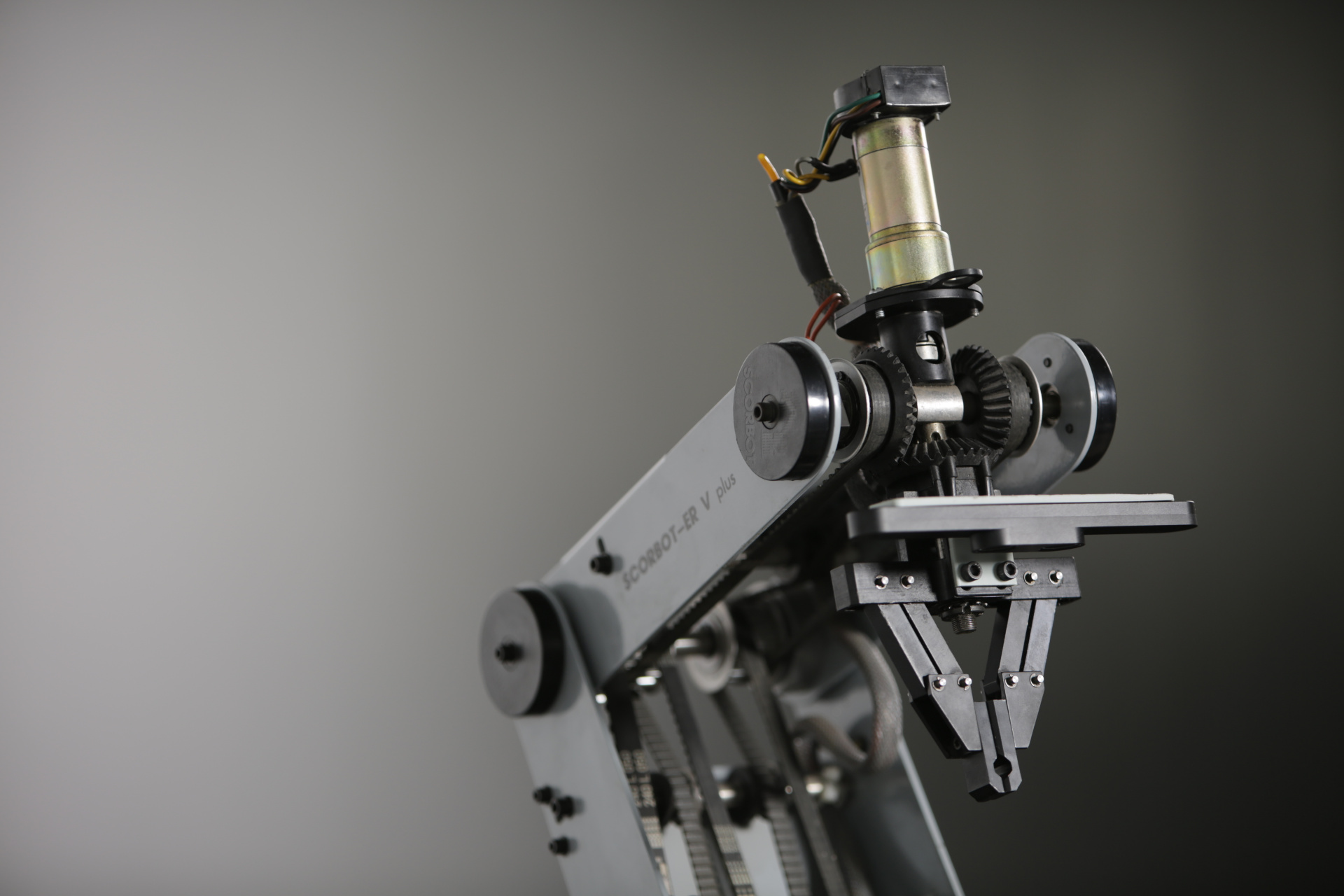
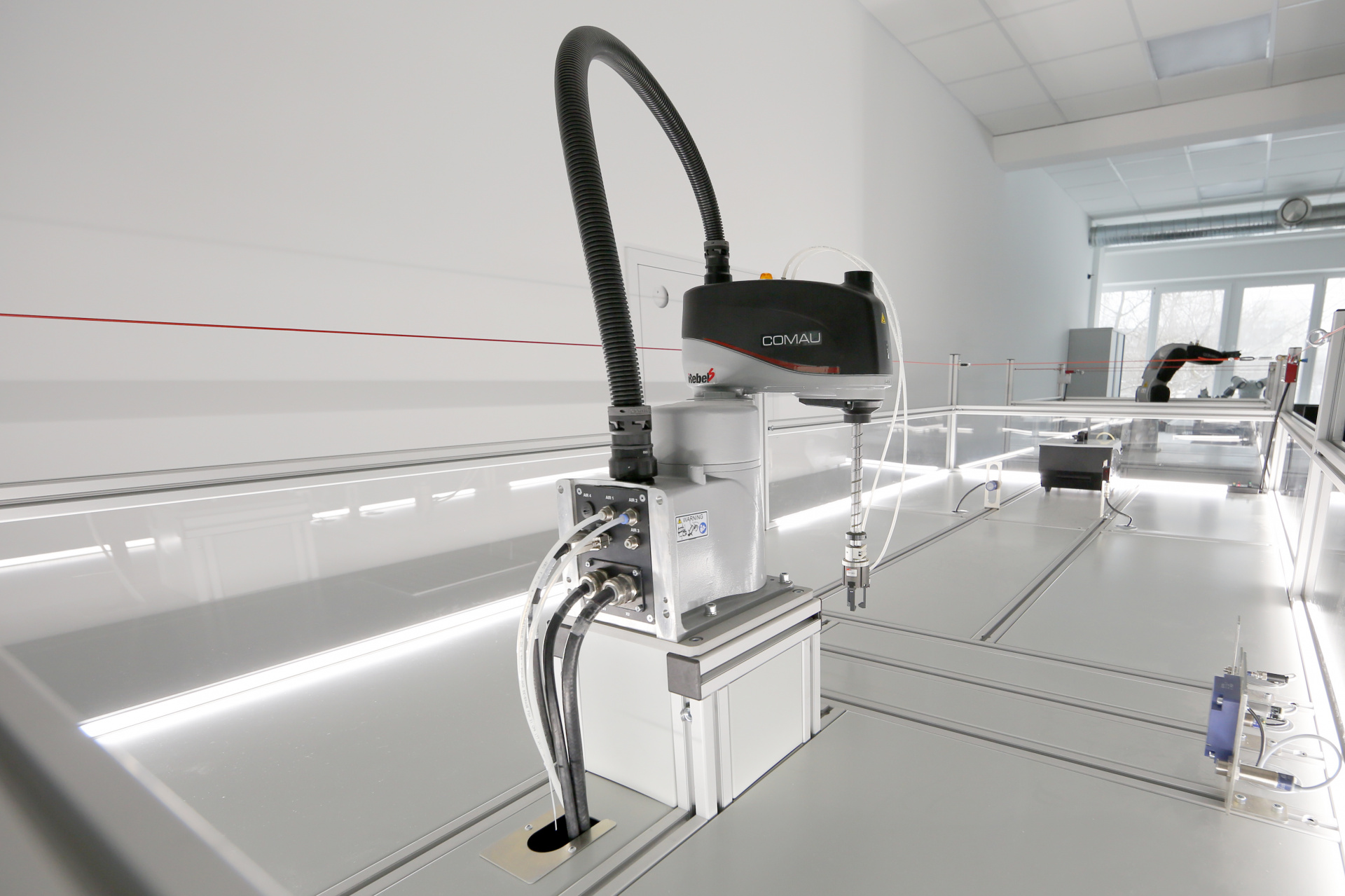
The Digital Robotics Manufacturing Laboratory is designed to train students in the design and programming of operations at robotic manufacturing facilities and the use of modern computer-aided design (CAD) tools for numerically controlled machines (CNC) as engineer or operator of contemporary SCADA systems and distributed process control systems in digital robotic manufacturing. The laboratory equipment includes 8 industrial robots connected by a common transport system, 2 robotic warehouses and 4 CNC machines.
The Hardware Components for Industrial Robotics Control Systems Laboratory. At this laboratory, students learn to design control systems made up of modern industry-standard hardware components. Students also master advanced software development techniques for such systems, including the use of real-time operating systems and Hardware-In-Loop simulation. The equipment consists of eight workbenches, each equipped with a programmable logic controller (PLC), a frequency converter, a two-axis servo drive, two step drives, an emergency safety system conforming to IEC61508, a distributed I/O system, and a Cartesian kinematics training robot.
The Laboratory of Data Measuring Instruments for Industrial Robotic Systems. At this laboratory, students explore the reasonable choice method and learn to use modern data measuring instruments in designing industrial control systems, as well as to configure them in practice. The laboratory equipment includes vision systems, force-torque sensing systems, platform-free inertial navigation systems, ultrasonic and laser distance sensors.
The Laboratory of Mathematical Simulation and Digital Industrial Robot Twins is intended for students to acquire the skills of independent industrial control system design and to simulate and create digital twins of robot-based complexes.
All of the center’s equipment, including its robots, machine tools, transport system, air treatment station, ventilation and air conditioning systems, access control system, lighting and power supply, are controlled by a DCS APROL distributed process control system.














© 2024 MIREA - Russian Technological University